Основы БДД
Безопасность дорожного движения – широкий комплекс мероприятий, в который вовлечены все слои общества: государство, профильные министерства, автопроизводители, инженерные специалисты, водители и пешеходы. Но если государственные стратегии и меры по БДД – явление опосредованное и часто – чисто теоретическое, то непосредственные участники дорожного движения влияют на дорожную безопасность напрямую, практически и ежедневно.
В первую очередь, обеспечивать высокий уровень безопасности на дорогах активно должны водители – они управляют транспортными средствами, которые считаются потенциально опасными машинами.
Поэтому знание основ безопасности, практические навыки вождения и четкое соблюдение ПДД автомобилистами всегда будет стоять первым пунктом в любой программе БДД. Основы дорожной безопасности изучаются в автошколах на теоретическом уровне, а затем водители постигают их в реальных условиях. Умение использовать знания на практике – важное условие БДД.
Основные понятия
Для достижения высокого профессионального уровня и умения избегать опасных ситуаций на дороге, водители должны хорошо знать ряд важных правил и понятий БДД чтобы эффективно применять их в любой момент. К таким основным понятиям относятся:
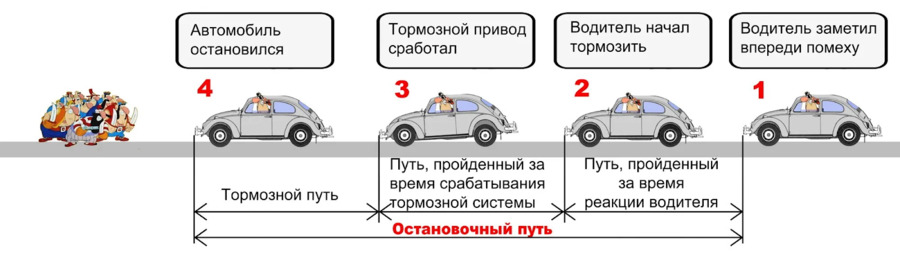
Остановочный путь
Это расстояние, пройденное ТС с момента обнаружения препятствия до полной остановки. Чтобы такой путь оказался минимальным, необходима хорошая реакция водителя и исправный автомобиль. Для этого водители раз в 5 лет проходят профессиональные аттестации и регулярно медицинские осмотры, а машины – ежегодный техосмотр. В теории остановочный путь складывается из двух составляющих: времени реакции водителя + тормозного пути.
Время реакции водителя
Это время, которое необходимо водителю с момента обнаружения на дороге опасного препятствия до начал его действий по уклонению от столкновения. Чем это время короче, тем выше шансы избежать ДТП, и зависит оно, в первую очередь, от физического состояния (уровня усталости и самочувствия), уровня зрения, опыта и скорости психических реакций человека.
Стандартное время реакции здорового и не усталого водителя – в пределах 1.5 секунд. Однако, если человек находится за рулем долго и не делает перерывов, не совсем здоров, пьян или рассеян, его реакции замедляются, а значит, растет остановочный путь и риск ДТП. Увеличение времени реакции водителя на 1 секунду – это лишние 25 метров пути на скорости до 90 км/час.
Кроме состояния водителя на время его реакции воздействуют также погодные (дождь, снег, ночь) и дорожные условия (плохая видимость, слабое освещение, заграждающие видимость объекты у дороги и т.д.), а также дополнительные обстоятельства (водителя отвлекают пассажиры, звонок по мобильному, изучение информации на панели приборов и т.п.).
Тормозной путь
Это расстояние, которое автомобиль проезжает с момента начала торможения до полной остановки. На его протяженность влияет время водительской реакции, состояние транспортного средства (скорость и масса авто, исправность тормозов и износ автопокрышек), дорожные и погодные условия:
- скорость должна соответствовать скорости основного транспортного потока, при маневрах – ниже, но всегда – без превышений на конкретном участке дороги;
- чем больше масса авто, тем сильнее нагрузка на тормоза, тем меньше сила трения колодок – тормозной путь увеличивается;
- оптимальное торможение без заноса – на грани блокировки колес (обычно срабатывает АБС), а на наклонном покрытии – двигателем или пониженной передачей;
- не изношенные покрышки лучше сцепляются с дорогой (даже мокрой и скользкой) и исключают занос на скользком покрытии;
- состояние проезжей части важно – с его учетом следует регулировать скорость и алгоритмы торможения, чтобы избежать движения юзом или заноса.
Важно! При своевременной реакции водителя и адекватном тормозном пути, остановочный путь будет коротким, что позволит избежать столкновения с препятствием на дороге. При несвоевременной реакции водителя или увеличенном тормозном пути, остановочный путь может оказаться критически длиннее расстояния до препятствия. Поэтому всегда следует соблюдать дистанцию от движущихся автомобилей и стараться среагировать на опасность с опережением.

Видимость и движение автомобиля
Стоит отметить, что существует еще ряд важных факторов, которые влияют на БДД и могут «вмешаться» в адекватный расчет остановочного пути. В частности, темное время суток усложняет правильное восприятие дистанции, и дальний свет автомобиля – плохой помощник при определении реального расстояния до опасного объекта, если используется в туман или снегопад.
Человеческий глаз в темное время суток не способен правильно определять расстояние и скорость объектов (оптическая иллюзия):
- обычно скорость встречного авто на плохо освещенной дороге воспринимается ниже, а расстояние до него ощущается как большее;
- реальная скорость собственного авто на равнинной местности (поле, степь, пустыня) обычно выше, чем кажется;
- реальное расстояние до предметов и автомобилей при плохой видимости на дороге меньше, чем кажется.
Чтобы не стать жертвой перечисленных оптических иллюзий, следует чаще сверяться с приборами (спидометр), соизмерять свое движение с другими транспортными средствами, двигаться без превышения скорости и поддерживать максимальную дистанцию на дороге.

Дорожные условия
Этот фактор влияет на БДД всегда и постоянно. Точно рассчитать остановочный путь можно только с учетом грамотного водителя, исправного автомобиля и нормального дорожного покрытия в сухую и теплую погоду. Все прочие дорожные условия вносят существенную коррекцию в поведение транспортного средства на дороге, даже если за рулем – профессионал, а машина безупречна.
Пи нестандартных дорожных условиях следует помнить следующие правила:
- при движении на спуске не следует тормозить – лучше притормаживать, а при крутом спуске использовать пониженную передачу (торможение двигателем);
- при движении на подъем можно использовать ручник или педаль тормоза, отпуская их при нажатии педали газа;
- при выезде на открытый участок дороге следует опасаться порыва бокового ветра – следует предварительно сбросить скорость, переключиться на пониженную передачу и регулировать траекторию движения авто рулем;
- на мокром асфальте и в сильный дождь скорость не должна превышать 80 км/час, а торможение лучше выполнять двигателем, сбрасывая передачи;
- на заснеженной дороге следует двигаться на пониженной передаче — без рывков, резких маневров и остановок;
- на мокрой грязи и льду следует двигаться без торможения, использования педали сцепления и резких движений руля (тормозить – только двигателем на пониженной передаче).
Важно! Следует помнить, что тормозной путь на сухом асфальте при скорости в 30 км/час будет в пределах 6 метров и увеличиться до 52 метров при скорости в 90 км/час. На обледенелой дороге при 30 км/час тормозной путь составит 17 метров, а при 90 км/час – вырастет до 152 метров. То есть, при движении по льду значение имеет и факт скольжения машины при нажатой педали тормоза (движение юзом).
Занос авто
Занос автомобиля – опасная ситуация, когда задняя часть кузова отклоняется от правильной траектории и начинает двигаться вправо или влево от передних колес. Если его вовремя не нейтрализовать, машина может уйти в неконтролируемое вращение, врезаться в соседние авто или вылететь с трассы.
Занос возникает при резких поворотах на мокрой или скользкой дороге как последствие действия центробежных сил, которые отталкивают транспортное средство в противоположную сторону от потенциального центра окружности, по которой выполняется движение при маневре.
При правильном маневре поворота, водителю необходимо сбросить скорость и направить машину к внешней стороне радиуса дуги в пределах полосы движения. Если приблизиться к внутренней стороне дуги на большой скорости, задние колеса начнет выносить вправо. Кроме того, занос на поворотах возникает при:
- одновременном резком увеличении скорости;
- резком торможении;
- резком повороте руля на большой скорости;
- неожиданном наезде на скользкий участок дороги или глубокую лужу воды.
То есть, в повороты, особенно на скользких дорожных покрытиях, нужно входить на небольшой постоянной скорости и очень плавно. Если же занос уже начался, важно сохранить контроль над машиной, для чего нужно соблюдать обязательные правила:
- Тормозить педалью или ручником нельзя!
- Нажимать на педаль сцепления нельзя!
- На заднеприводных авто торможение выполняется двигателем – необходимо сбросить передачу и ослабить нажатие на педаль газа.
- На переднеприводных машинах следует плавно прибавить газ.
- Выравнивать траекторию движения можно обратным поворотом руля, плавно, в несколько приемов поворачивая его в сторону заноса.
Полноприводные автомобили также выводятся из заноса плавным поворотом руля, а педалью газа следует «нащупать» оптимальное положение, при котором передние колеса выровняют траекторию, а задние вернутся в «колею».
Что делать при опрокидывании авто
Автомобиль может опрокинуться под воздействием той же центробежной силы при скоростном движении по крутой дуге. Чем выше скорость и круче радиус поворота – тем выше риск того, что машина «пойдет через крышу». При этом боковая центробежная сила – это «квадрат скорости» (скорость выше вдвое, центробежная сила – вчетверо).
Кроме того, значение имеет центр тяжести транспортного средства – чем он ниже, тем машина устойчивее на дороге при боковых маневрах. Поэтому грузы в авто следует размещать максимально низко и равномерно.
Чтобы избежать опасного переворачивания, которое легко может произойти на сухой и ровной дороге при идеальной видимости, в повороты следует входить:
- по плавной дуге с небольшим радиусом;
- максимально приблизив авто к внешнему краю дорожной дуги;
- на минимальной стабильной скорости;
- с правильно распределенным и хорошо закрепленным на местах грузом.
А вот если при маневре начать тормозить или резко поворачивать руль, появляется дополнительная угроза заноса. И тут непонятно, что может быть опаснее.

- Как правильно рассчитать безопасную дистанцию во время дорожного движения?
В теории БДД есть только понятие безопасной дистанции, но нет алгоритма ее расчета. Тем не менее водителям рекомендовано на сухой дороге определять безопасную дистанцию в метрах как половину числового выражения скорости (при 50 км/час дистанция должна быть не менее 25 метров). На скользком или мокром покрытии дистанция в метрах должна быть равна скорости в километрах (50 км/час – дистанция не менее 50 метров).
- Можно ли правильно соблюдать дистанцию по отношению к автомобилю, который идет сзади?
В принципе, это невозможно, так как водитель заднего авто может сам не соблюдать дистанцию. Безопасное расстояние следует просто контролировать через зеркало заднего вида. Если машина сзади все время «приживается» к вашему автомобилю, заранее сигнализируйте ей о предполагаемых маневрах и тормозите плавно и постепенно.
- Как определить свое физическое состояние при управлении автомобилем?
Если вы за рулем не более 4 часов и не испытываете чувства недосыпания или недомогания, то ваше состояние можно расценивать как нормальное. Если дорога занимает более 4 часов, старайтесь в конце каждого часа дороги делать короткие пятиминутные остановки, чтобы выйти из машины и размяться. Если же путь дальний, а вы начинаете чувствовать утомление, некоторую сонливость и потерю концентрации на дорожной обстановке – это сигнал того, что вам нужен отдых.
- Если груз на автомобиле закреплен на верхнем багажнике, а в салоне – 4-5 человек, то насколько высока опасность заноса или переворачивания?
Багажник на крыше требует более осторожного выполнения боковых маневров, так как пассажиры и грузы находятся выше центра тяжести авто. При резком повороте на большой скорости опасность заноса невысока – машина перегружена и сильнее прижимается к дороге, но на скользком покрытии может повести себя неадекватно. А вот опасность переворачивания, наоборот, возрастает. Двигаться следует осторожно, сбрасывая скорость на поворотах и выбирая более широкую дугу маневра.

В заключении следует отметить, что основы БДД – максимально важный элемент общего комплекса безопасности на дорогах. Можно бесконечно изучать и детально знать теорию правильного поведения на дороге, но решать задачи безопасности можно только практически – на дороге.
Тем не менее, доскональное знание основ БДД важно для последующего их практического применения. Эти правила формируют у водителя полезные навыки безопасного вождения и становятся фундаментом его профессионализма.

Автор: Киселев Я.Л.
Организация и безопасность движения на автомобиле
ОТРАСЛЕВОЙ ДОРОЖНЫЙ МЕТОДИЧЕСКИЙ ДОКУМЕНТ
РЕКОМЕНДАЦИИ
ПО ОБЕСПЕЧЕНИЮ БЕЗОПАСНОСТИ ДВИЖЕНИЯ НА АВТОМОБИЛЬНЫХ ДОРОГАХ
1. РАЗРАБОТАН: Московским автомобильно-дорожным государственным техническим университетом (МАДИ), ФГУП «РосдорНИИ» с участием ИТС ВолгГАСА.
2. ВНЕСЕН: Управлением эксплуатации и сохранности автомобильных дорог Федерального дорожного агентства.
4. ИМЕЕТ РЕКОМЕНДАТЕЛЬНЫЙ ХАРАКТЕР.
Раздел 1. Область применения
Отраслевой дорожный методический документ «Рекомендации по обеспечению безопасности движения на автомобильных дорогах» разработан в соответствии с заданием Федерального дорожного агентства Министерства транспорта Российской Федерации.
«Рекомендации» определяют и разъясняют принципы обеспечения безопасности движения путем совершенствования дорожных условий, методы оценки безопасности движения и назначения мероприятий по повышению транспортно-эксплуатационных качеств автомобильных дорог, рекомендации по их планированию и согласованию.
ОДМ рекомендуется к применению при проектировании новых, реконструкции, ремонте и эксплуатации существующих автомобильных дорог общего пользования, а также при разработке нормативных документов в области обеспечения безопасности движения.
Раздел 2. Нормативные ссылки
1. ГОСТ Р 52398-2005. Классификация автомобильных дорог. Основные параметры и требования.
2. ГОСТ Р 52399-2005. Геометрические элементы автомобильных дорог.
4. СНиП 2.05.02-85. Автомобильные дороги. — Госстрой СССР, 1986 (1997 г.). — 51 с.
5. СНиП 2.05.03-84*. Мосты и трубы. — Минстрой России, 1996.
6. ГОСТ Р 50597-93. Автомобильные дороги и улицы. Требования к эксплуатационному состоянию, допустимому по условиям обеспечения безопасности движения.
7. ГОСТ Р 51256-99. Технические средства организации дорожного движения. Разметка дорожная. Типы и основные параметры. Общие технические требования.
8. ГОСТ Р 52289-2004. Технические средства организации дорожного движения. Правила применения дорожных знаков, разметки, светофоров, дорожных ограждений и направляющих устройств.
9. ГОСТ Р 52290-2004. Технические средства организации дорожного движения. Знаки дорожные. Общие технические требования.
10. ГОСТ Р 50970-96. Технические средства организации движения. Столбики сигнальные дорожные. Общие технические требования. Правила применения.
11. ГОСТ Р 509971-96*. Технические средства организации движения. Светоотражатели дорожные. Общие технологические требования. Правила применения.
* Вероятно, ошибка оригинала. Следует читать: ГОСТ Р 50971-96.
12. ОДН 218.012-99. Общие технические требования к ограждающим устройствам на мостовых сооружениях, расположенных на магистральных автомобильных дорогах.
13. ГОСТ Р 52766-2007. Дороги автомобильные общего пользования. Элементы обустройства. Общие требования.
15. ГОСТ 30413-96. Дороги автомобильные. Метод определения коэффициента сцепления колеса автомобиля с дорожным покрытием.
16. ГОСТ 30412-96. Дороги автомобильные и аэродромы. Методы измерений поверхностей оснований и покрытий.
17. ОДН 218.0.006-2002. Правила диагностики и оценки состояния автомобильных дорог. Основные положения.
Раздел 3. Термины и определения
В настоящем методологическом документе применены следующие термины с соответствующими определениями.
3.1. Аварийность — показатель безопасности движения в виде абсолютного числа дорожно-транспортных происшествий, числа погибших и раненых или в виде отношения количества ДТП к числу транспортных средств, численности населения или пробегу автомобилей за определенный промежуток времени.
3.2. Безопасность дорожного движения — состояние данного процесса, отражающее степень защищенности его участников от дорожно-транспортных происшествий и их последствий.
3.3. Обеспечение безопасности дорожного движения — деятельность, направленная на предупреждение причин дорожно-транспортных происшествий, снижение тяжести их последствий.
3.4. Дорожные условия — совокупность геометрических параметров, транспортно-эксплуатационных качеств дороги, дорожных покрытий, элементов обустройства и обстановки.
3.5. Режим движения — комплексная характеристика движения транспортного потока, включающая скорости движения, интервалы между движущимися транспортными средствами, количество маневров (перестроений, обгонов).
3.6. Условия движения — реальная обстановка на дороге, в которой находится транспортное средство в данный момент (дорожные условия, режим движения, состояние окружающей среды).
3.7. Планировочные решения — технические разработки в проектах плана, продольного и поперечного профилей дороги, направленные на повышение её транспортно-эксплутационных* качеств, в том числе, на повышение безопасности движения (например, улучшение планировки пересечения посредством устройства переходно-скоростных полос, увеличения радиусов съездов и т.п.).
* Текст документа соответствует оригиналу. — Примечание изготовителя базы данных.
3.8. Инженерное оборудование — комплекс дорожных сооружений и технических средств организации движения, относящихся к элементам обустройства и обстановки дороги.
Раздел 4. Общие положения
4.1. Показатели степени аварийности
Для оценки степени аварийности на отдельных дорогах или дорожной сети в целом пользуются системой показателей, основанных на анализе количества и тяжести дорожно-транспортных происшествий с учетом пробега автомобилей, состояния автомобильного парка и других факторов.
4.1.1. Коэффициент относительной аварийности показывает число дорожно-транспортных происшествий по отношению к пробегу автомобилей или к числу проездов автомобилей. В первом случае коэффициент характеризует степень аварийности на длинных и однородных по геометрическим элементам участках дорог:

, ДТП на 1 млн авт.-км;
во втором случае — на коротких участках (пересечения и примыкания, небольшие мосты, путепроводы и т.п.):

, ДТП на 1 млн авт.-проездов,
где — количество происшествий за период времени ;
— период времени, сут;
— среднегодовая интенсивность движения (средняя за период времени ), авт./сут;
— длина участка дороги, км.
Для получения надежных значений коэффициентов относительной аварийности следует располагать данными о ДТП за период времени, равный 3-5 годам. Для удобства пользования коэффициент относительной аварийности может измеряться числом ДТП на 10 или 100 млн авт.-км (авт.-проездов).
4.1.2. Показатель относительной тяжести характеризует число погибших в расчете на 100 млн авт.-км (авт.-проездов), определяется так же, как коэффициент относительной аварийности с заменой числа ДТП на число погибших в них.
4.1.3. Тяжесть происшествий может быть оценена показателем числа погибших или раненых, приходящихся на одно (для удобства пользования на 10 или 100) ДТП.
4.1.4. Для общей оценки аварийности на улично-дорожной сети отдельных регионов или страны в целом может использоваться показатель, характеризующий годовое число происшествий в расчете на 10 тыс. зарегистрированных на данной территории автомобилей.
4.4.3.* В целях сопоставления показателей аварийности на дорогах с показателями, принятыми в системе здравоохранения (смертность от болезней, несчастных случаев в быту и других подобных причин), может определяться индекс «риск смертности» — число погибших в дорожно-транспортных происшествиях за год в расчете на 100 тыс. населения.
* Нумерация соответствует оригиналу. — Примечание изготовителя базы данных.
4.2. Основные мероприятия по обеспечению безопасности дорожного движения
Обеспечение безопасности движения и высоких транспортно-эксплутационных качеств автомобильных дорог является одним из главнейших направлений деятельности служб дорожного хозяйства.
В комплексе мероприятий, объединяющих различные методы и способы улучшения условий движения на дорогах, основными являются:
— планировочные мероприятия, обеспечивающие безопасность движения посредством совершенствования геометрических параметров плана, продольного и поперечного профиля дороги и её элементов;
— совершенствование методов расчета и выбора параметров дорог, повышающих безопасность движения;
— оборудование дорог техническими средствами организации движения, обустройство дорог;
— повышение транспортно-эксплутационных качеств дорожных покрытий;
— организационные мероприятия, направленные на создание в службах эксплуатации дорог специальных подразделений для решения вопросов обеспечения безопасности движения.
4.3. Характерные участки дорог повышенной аварийности
4.3.1. При анализе причин дорожно-транспортных происшествий в качестве основных рассматривают техническое состояние автомобиля, состояние и действия водителя, дорожные условия, воздействие погодно-климатических факторов. Дорожные условия могут проявляться как основные, так и косвенные причины, способствующие возникновению ДТП.
4.3.2. Повышенным количеством происшествий и высокой вероятностью появления заторов чаще всего характеризуются участки:
1) на которых резко уменьшается скорость движения преимущественно в связи с недостаточной видимостью. В этом случае при высокой интенсивности и большой скорости движения возможны столкновения автомобилей и съезды с дороги. Такие участки, как правило, имеют пониженную пропускную способность;
2) у которых какой-либо элемент дороги не соответствует скоростям движения, обеспечивающим* другими элементами (скользкое покрытие, узкий мост на длинном прямом горизонтальном участке, кривая малого радиуса в конце затяжного спуска, сужение дороги, неукрепленные обочины и т.д.), здесь чаще всего происходят опрокидывания или съезды автомобилей с дороги;
* Текст документа соответствует оригиналу. — Примечание изготовителя базы данных.
3) где из-за погодных условий создается несоответствие между скоростями движения на них и на остальной дороге (низкие насыпи на участках, где часты туманы; на дорогах, проходящих по северным склонам гор и холмов; около промышленных предприятий с производством, влияющим на состояние атмосферы; на путепроводах и мостах, на проезжей части которых возможно неожиданное образование гололеда и т.д.);
4) где возможны скорости, которые могут превысить безопасные пределы (длинные затяжные спуски на прямых, прямые участки в открытой степной местности);
5) где у водителя исчезает ориентировка в направлении дороги или возникает неправильное представление о нем (поворот в плане непосредственно за выпуклой кривой, неожиданный поворот в сторону с примыканием второстепенной дороги по прямому направлению);
6) слияния, разделения или перекрещивания транспортных потоков на пересечениях дорог, съездах, примыканиях, переходно-скоростных полосах;
7) проходящие через малые населенные пункты или расположенные в зоне объектов сервиса, автобусных остановок, площадок отдыха и т.д., где имеется возможность неожиданного появления пешеходов и транспортных средств с придорожной полосы;
 где однообразный придорожный ландшафт, план и профиль способствуют потере водителем контроля за скоростью движения или вызывают быстрое утомление и сонливость (например, длинные прямые участки в степи);
где однообразный придорожный ландшафт, план и профиль способствуют потере водителем контроля за скоростью движения или вызывают быстрое утомление и сонливость (например, длинные прямые участки в степи);
9) участки, на которых на обочине и в непосредственной близости от бровки расположены деревья или другие препятствия;
10) участки многополосных дорог без разделительной полосы при высокой интенсивности движения;
11) участки без стационарного освещения в темное время суток, например транспортные развязки, а также участки кривых в плане, где возможно ослепление водителей светом фар встречных автомобилей.
Раздел 5. Методы оценки безопасности движения
Для выявления опасных участков, в пределах которых следует в первую очередь предусматривать мероприятия по обеспечению безопасности движения, могут быть использованы следующие методы: метод, основанный на анализе данных о ДТП; метод коэффициентов аварийности; метод коэффициентов безопасности.
Проблемы безопасности дорожного движения, разбираем по пунктам
Проблемы безопасности дорожного движения, разбираем по пунктам
Как так получается, что автомобиль с чрезвычайно простым управлением (вперёд, назад, влево, вправо) становится причиной ежегодной гибели более миллиона человек? Очевидно, что это связано не со сложностью управления автомобилем, а с проблемами организации дорожного движения (ограничениями скорости, очерёдности проезда и так далее). Ставим задачу найти полное решение каждой проблемы дорожного движения. В данной статье будем рассматривать концептуальный уровень, то есть что надо сделать для полного решения каждой проблемы. А как это реализовать и сколько это будет стоить, рассмотрим позже.
1. Проблема недостатка информации
Самое первое, что нужно для принятия любого управленческого решения – это максимально полная информация об объекте управления. И тут мы выясняем, что у водителя в общем случае полной информации нет и быть не может даже теоретически. То есть, даже если мы на автомобиль поставим все существующие датчики, то всё равно полной информации, необходимой для принятия решений по управлению мы не получим, ни за какие деньги.

Нужна ли Вам камера, показывающая, есть ли пешеход за углом здания?
Из автомобиля не видно, что происходит даже за ближайшим припаркованным автомобилем, не говоря уже о том, что происходит за углом. Причём никакие датчики, устанавливаемые на автомобиль (радары, лидары и так далее) здесь не помогут. Частично, здесь могут помочь перспективные системы Car-to-Car, но полностью проблему они решить не смогут, так как будут случаи, когда по близости просто не будет других автомобилей. Соответственно, нам нужен внешний (по отношению к автомобилю) источник постоянной информации о дорожном движении. То есть, инфраструктура полного и постоянного наблюдения за всеми дорогами и придорожной территорией. К сожалению, даже перспективные системы Car-to-I Car-to-X (автомобиль-инфраструктура и автомобиль-всё) полностью проблему тоже решить не смогут. Так как в принципе не обладают полнотой, что на определённом этапе даже снизит безопасность. Например, если нет никаких систем, то перед слепым поворотом, водитель снижает скорость, так как не знает, что там. А если системы CarToX установлены на 99% автомобилей, то водитель думает, что раз информация из-за угла не поступила, значит с вероятностью 99% там ничего опасного нет, а следовательно, и тормозить излишне. Понятно, что с вероятностью 1% за поворотом может быть сломавшийся грузовик или упавшее дерево. Но так как вероятность этого очень мала, то многие водители не будут снижать скорость и, соответственно въедут в грузовик на бОльшей скорости, чем при отсутствии дополнительной информации от CarToX.

Решение очевидно, надо датчики наблюдения вынести из автомобиля и расположить равномерно по всей дороге.
Таким образом, для полного решения проблемы ограниченной и недостаточной видимости из автомобиля надо создать внешнюю инфраструктуру полного постоянного наблюдения за всеми дорогами с существующих столбов освещения. Это вполне возможно, мы просто поставим столько камер, сколько нужно, и так часто, как нужно.
2. Гадание в принципе не может решить проблему недостатка информации
Так как транспорт движется с высокой скоростью и обладает большой инерцией, то просто знать точные координаты всех участников дорожного движения недостаточно. Нужна точная информация об их намерениях. Существующие ПДД предписывают водителю прогнозировать действия других участников движения. Очевидно, что если Вы не баба Ванга, то точные предсказания невозможны. Опять таки, даже перспективные системы CarToX полностью проблему решить не смогут, так как в принципе не обладают полнотой и достоверностью. Но решение этой проблемы хорошо известно. Это центральная диспетчеризация, например, как в авиации. То есть, вместо существующего принципа «еду как хочу» вводится разрешительный принцип «по согласованию с диспетчером». Таким образом, у диспетчера будет вся точная информация о намерениях всех водителей.
3. Проблема полноты информации и её общности

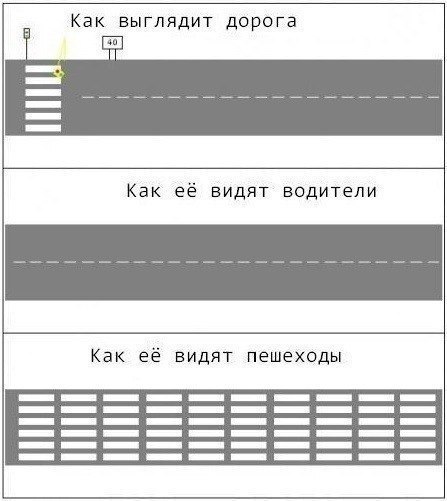
На водителя обрушивается иногда просто запредельное количество информации. А многие знаки надо не просто распознать, а ещё и помнить зону их действия. А если знак не виден за ветками деревьев? А если его сдуло, или бомжи сняли на металлолом? Причём информация должна быть ОБЩЕЙ для всех. То есть, одностороннее движение должно быть корректно отображено с двух направлений, иначе возможно лобовое столкновение в котором каждый будет считать себя правым. Другая проблема, что практически все знаки являются постоянными. Но ограничения скорости сильно зависят от конкретных погодно-дорожных условий, но знаки этого не отображают.
Ну и главный вопрос, а зачем Вам все эти знаки? Они нужны, чтобы как-то упорядочить существующий хаос. То есть, это костыли, которые никак саму проблему хаоса не решают. Но её полностью решает единая справочная система (центральная диспетчеризация).
4. Прогнозов много, а план один
Недостатком систем центральной диспетчеризации является экспоненциальный рост вычислений при масштабировании. Так как добавление N+1 участника вынуждает строить прогнозы его взаимодействия с уже имеющимися N участниками. Таким образом, с диспетчеризацией огромного количества автомобилей не справится не только человек-диспетчер, но и быстродействующий компьютер. Другим недостатком центральной диспетчеризации является её работа в реальном времени (любую ситуацию надо разрулить здесь и сейчас). Очевидно, что могут случайно возникнуть ситуации, которые в принципе не имеют безопасного решения (задача вагонетки это не про автоматический автомобиль, а про существующее хаотическое движение, которое иногда безопасно разрулить невозможно даже теоретически). Но полное решение есть! Надо просто отказаться от прогнозов и перейти к заранее известному и согласованному плану дорожного движения. Таким образом, вместо множества вероятностных прогнозов дорожной обстановки, мы получаем один заранее известный план дорожного движения. Причём вычислительно, это простая и давно решённая задача построения маршрутов на графе дорожной сети. Она даже на порядок проще существующего построения маршрутов, так как не оперирует вероятностями, а имеет полную информацию центральной диспетчеризации. С такой задачей справится даже бытовой компьютер, точнее много компьютеров с иерархической структурой взаимосвязей. Таким образом, становится возможна АВТОМАТИЧЕСКАЯ центральная диспетчеризация всего дорожного движения в реальном времени. То есть, проблема недостатка информации полностью решена.
Одновременно центральная диспетчеризация + полное постоянное видеонаблюдение решает чрезвычайно важную и практически нерешаемую другими способами проблему достоверности информации. Как в системах CarToX гарантировать, что вы получаете достоверную информацию от других автомобилей, а не поддельную от хакеров?
5. Вариантов решения множество, поэтому конфликты неизбежны. А план один
Никогда не задумывались, откуда берутся конфликты и хамство на дороге? От многовариантности! То есть, когда есть конкурирующие варианты, строго непрописанные в ПДД, всегда будут конфликты.
И с этим ничего не сделать, так как для любого человека существует только два варианта: его мнение и неправильное мнение. Но способ решения любых конфликтных ситуаций хорошо известен – это независимый арбитр. В качестве такого арбитра и может выступать автоматическая центральная диспетчеризация. Более того, а зачем нам арбитр? Нам арбитр не нужен! Ведь арбитр нужен для решения возникающих конфликтных ситуаций, но у нас ведь плановое движение, которое сам арбитр и планирует. То есть, достаточно ещё на этапе планирования создавать план таким образом, чтобы потенциально конфликтных ситуаций просто не возникало. Тогда ни конфликтов, ни автомобильного хамства на их основе не будет в принципе!
6. Кто виноват и что с этим делать
Все, кто сталкивался с разбором ДТП, знает, что истинного виновника однозначно установить крайне сложно. Объективной информации нет или её недостаточно, а свидетели зачастую сами заинтересованные лица. И проблема здесь фундаментальная, так как по существующим ПДД в принципе отсутствует понятие правильная, в данном контексте безопасная, траектория. То есть, если оба водителя грубейшим образом нарушили ПДД, и оба выехали через двойную сплошную на встречку, но при этом разъехались без столкновения, то это происшествие даже не попадёт в сводки. А если один водитель будет строго следовать ПДД и тормозить прямо, то будет лобовое столкновение. Более того, в суде этого водителя могут признать даже виновным, так как он не выполнил другой пункт ПДД и не сделал всего возможного для избегания столкновения. И ПДД полны таких противоречий. В результате, практически всегда, хотя бы в чём-то, можно обвинить любого водителя. Обратите внимание, что ГИБДД, которое такие противоречивые ПДД и создало, всегда будет ни при чём. С другой стороны, понятно, что все потенциально опасные случаи расписать невозможно. Но решение есть! Надо чтобы автоматическая центральная диспетчеризация предписывала каждому транспорту ПРАВИЛЬНУЮ траекторию. Сделать это можно очень просто самым надёжным и простым графическим моделированием. То есть, никакие две траектории на плане дороги не должны никогда пересекаться. Таким образом, кто первый отклонился от своей правильной траектории, тот и виноват. В результате вопрос ответственности всегда решается объективно и однозначно.
7. Вопросы взаимодействия

Итак, все конфликтные ситуации в плановой системе центральной диспетчеризации исключены. Остаётся добавить устройство, осуществляющее взаимодействие каждого участника с системой центральной диспетчеризации и, уже через неё со всеми другими участниками дорожного движения. Для этого в каждый автомобиль устанавливается «Индивидуальный светофор» (ИС) для автомобилей и пешеходов, который осуществляет постоянную двухстороннюю связь с автоматическим диспетчером. Он состоит из двух экранов, один внутри автомобиля для водителя, а другой впереди снаружи автомобиля для пешеходов. Таким образом, абсолютно все перекрёстки и переходы становятся светофорно-регулируемыми, а все ограничения контекстными. При этом физически светофоры и дорожные знаки вообще нигде не нужны. То есть, проблема взаимодействия всех участников дорожного движения полностью решена через использование единого посредника (автоматической центральной диспетчеризации).
8. Взаимодействие с пешеходами
А как планировать действия пешеходов? А их и не надо планировать, достаточно ими безопасно управлять. Ведь с точки зрения безопасности, пока пешеход находится на тротуаре систему дорожной безопасности он не интересует. То есть, куда и как пешеходы ходят по тротуару никак не влияет на безопасность (столкновение пешеходов друг с другом фатальными не являются).
Таким образом, нам достаточно гарантировать безопасность перехода дороги пешеходами в удобных для пешехода местах. Для этого впереди каждого автомобиля устанавливается «Индивидуальный светофор» (ИС) для пешеходов (красно-зелёная светодиодная лента вверху лобового стекла снаружи автомобиля). Так как этот пешеходный ИС управляется общей автоматической центральной диспетчеризацией, то он гарантирует безопасность пешеходов. А так как этот светофор перемещается вместе с автомобилями, то пешеходный переход может быть в любом месте, где диспетчер даст автомобилям команду остановиться, чтобы пропустить пешеходов. То есть, в любом месте где удобно переходить пешеходу, но не в любое время.
То есть, очень неудобные внеуличные пешеходы становятся бессмысленными!

Центральная диспетчеризация полностью регулирует интервалы движения по дороге пешеходов и транспорт (улучшенный адаптивный светофор).
Здесь принципиальны три отличия от существующих пешеходных светофоров:
- Зелёный существующих пешеходных светофоров не гарантирует безопасность (что пешехода не собьёт лихач из третьего ряда, которого пешеход не видит), а зелёный ИС гарантирует безопасность, так как центральная диспетчеризация видит всё и управляет всем транспортом. То есть, зелёный на пешеходном ИС загорится только когда ВСЕ автомобили на этом участке остановятся.
- ИС позволяет пешеходу безопасно переходить дорогу в любом удобном для него месте, а существующий пешеходный светофор (переход) вынуждает пешехода становиться нарушителем, так как вероятность попасть под машину существенно меньше затрат на сотни метров похода до ближайшего пешеходного перехода.
- Все пешеходные светофоры «адаптивные», то есть ситуация, когда никого нет, но по времени горит красный полностью исключена.
Таким образом, в такой системе, если пешеход конечно не самоубийца, то он никогда не пойдёт на красный свет ИС, так как это ГАРАНТИРОВАННО опасно.
9. Нехватка времени на реагирование
Так как у нас появляется гарантированно безопасный план и точные координаты всего транспорта, то просто вычитая два вектора (реальный из планового) мы на максимально раннем этапе определяем ещё только потенциально опасные ситуации. Это максимально решает проблему нехватки времени на реагирование. Например, сейчас водитель видит, что встречный автомобиль слегка смещается к центральной линии. Что делать? А ничего, так как совершенно неизвестна причина этого смещения: может водитель объезжает яму и потом вернётся в свою полосу, а может водитель потерял управление и это начальная фаза выезда на встречную полосу?

Сейчас, как говорится, не всё так однозначно!
Проблема в том, что когда уже станет очевиден выезд на встречку, времени на реакцию уже может не хватить. Но наличие в плане гарантированно безопасной траектории полностью решает эту проблему. В данном примере, точно известно, что это начальная фаза выезда на встречку, так как никакого объезда ямы в плане нет. Следовательно, это начальная фаза потери управления и надо начинать реагировать.
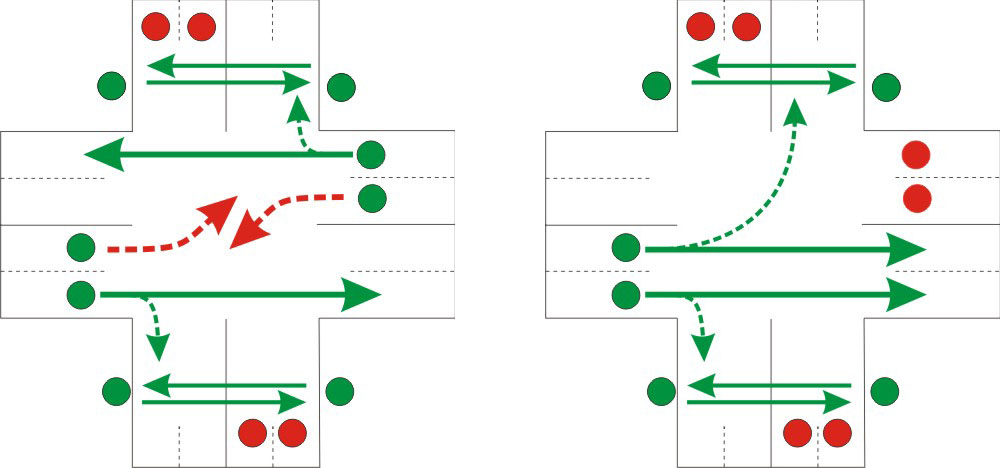
10. А как безопасно разъехаться
Итак складывается опасная ситуация, условно, два автомобиля едут лоб в лоб. Что делать? Надо принять скоординированное решение (либо оба влево, либо оба вправо). Так куда, влево или вправо? Понятно, что второй будет реагировать на решение первого. Но кто должен поворачивать первым? Сейчас на эти вопросы однозначного ответа в принципе нет (неписанные правила потому и неписанные, что работают не всегда).
Объезд встречного дурака слева
И здесь нас опять выручает система центральной диспетчеризации, которая даёт однозначную команду, например, оба влево (что противоречит и писанным и неписанным правилам) но не приводит к ДТП.
11. А как быть с велосипедистами?
Естественно, абсолютно все участники дорожного движения, постоянно находящиеся на дороге, то есть, все за исключением пешеходов, обязаны подключиться и выполнять указания центральной диспетчеризации. И велосипедисты, как наименее защищённый транспорт, больше всего в этом заинтересованы.
12. Штрафы не нужны
Так как автоматической диспетчеризации известен план и реальность, то уже при минимальном отклонении, ещё на начальном этапе, выдаётся предупреждение. Например, если Вы будете жать на газ с той же интенсивностью, то через несколько секунд Вы превысите скорость. Если это минимальное превышение произошло случайно, то водитель исправится и реального превышения скорости не будет. Соответственно и штрафовать его просто не за что! Аналогично и со всеми другими нарушениями, например, водитель просто не получит разрешение на парковку в запрещённом месте. Таким образом остаётся единственное нарушение – это преднамеренное (после нескольких предупреждений) игнорирование команд диспетчера. Понятно, что водителя в отношении которого объективно и документально доказано, что он преднамеренно нарушил ПДД надо не просто лишать водительских прав, а заводить дело против того, кто ему эти права выдал.
13. А что делать с неадекватными водителями и злостными нарушителями?
К чему все эти правильные предупреждения, если их можно будет проигнорировать, и соответственно гарантировать безопасность будет невозможно?
Две секунды, 22 трупа.
Поэтому, для того чтобы гарантировать безопасность, то есть строгое выполнение плана, «Индивидуальный светофор» в каждом автомобиле подключается к органам управления автомобиля и может дистанционно заблокировать любые ещё только потенциально опасные действия водителя. Это гарантирует 100% безопасность дорожного движения с точностью до технической неисправности. Для этого, существующие серийные системы экстренного торможения надо улучшить, используя возможности полной информации и планового движения. То есть, они будут работать не в некоторых простейших ситуациях, как сейчас, а абсолютно во всех опасных ситуациях.
Таким образом, преднамеренно ПДД можно будет нарушить только один раз. А ездить без прав в системе полного наблюдения невозможно в принципе.
14. Ответственность

Ещё с детского сада, родители учат детей, что: «Вышел на дорогу, отвечаешь за свою безопасность сам». И смотреть надо не на светофор, а на машины, так как ни один светофор ещё ни одного пешехода не убил. Иначе будешь правым, но мёртвым. А сел за руль транспортного средства повышенной опасности, так отвечаешь вообще за всё.
А хотят ли водители и пешеходы отвечать за действия других участников дорожного движения, на которые они повлиять никак не могут? Вопрос не такой уж и глупый. Так как, если в ответственности за свои действия логика есть, то в ответственности за других, никакой логики нет! Поэтому вся ответственность за организацию дорожного движения должна быть возложена на автоматическую систему центральной диспетчеризации, которая имеет всю полноту информации и может напрямую влиять на действия всех участников движения через автомобильный и пешеходный Индивидуальные Светофоры. То есть, за безопасность плана отвечает Евклид со своей геометрией, за практическую реализацию этой геометрии отвечают конкретные программисты, а водители и пешеходы отвечают только за чёткое выполнение требований автоматической центральной диспетчеризации по соблюдению плана дорожного движения.
15. А зачем тогда водитель?
Так как водитель по сути становится только исполнителем, а исполнять компьютер может гораздо лучше человека, то полноценный автоматический автомобиль пятого уровня получается сам собой, как побочный продукт. При этом нет никакого смысла водителю, который безопасно управляет автомобилем, запрещать получать удовольствие от вождения. Хотя классический подход к автоматическому автомобилю предполагает в перспективе полный запрет «мясных» водителей. Но об этом в следующей статье …
Итог: последовательно рассмотрев все основные проблемы дорожного движения мы пришли к выводу, что все они могут быть полностью решены. И юморная картинка в заглавии статьи в принципе может быть реализована на практике.
Это вторая статья цикла. Обзорное описание принципа работы такой системы «ИТС СПРУТ» можно посмотреть в первой статье цикла ссылка
P.S. Так как сторонники плоской Земли Vision Zero заминусовали мне карму, то возможности не только бороться с троллями, но и отвечать на комментарии у меня практически нет. Но все комментарии я читаю, и на все комментарии по сути и строго по теме статьи (напоминаю, что в этой статье обсуждаем решение только на концептуальном уровне) я отвечу в Update к статье.
Сразу отвечу, зачем я связался с критикой Vision Zero. Проблема в том, что пока Vision Zero считается идеальной и безальтернативной, другие концепции просто не рассматриваются! А зачем? Ведь у нас есть идеальное решение Vision Zero, мы его прописали в дорожные карты и всё. Поэтому головная российская организация по инновациям Национальная Технологическая Инициатива (НТИ) так мне и пишет: «Идея проекта признана целесообразной, однако не может быть реализована в рамках Дорожной карты Автонет, так как не соответствует ни одному из её направлений, и не может быть вынесена на РАССМОТРЕНИЕ Рабочей группой Автонет».
Источник https://www.driver-helper.ru/text/sovetiy/osnovy-bdd
Источник https://docs.cntd.ru/document/1200084056
Источник https://habr.com/ru/post/440614/


